Künstlicher "akustischer" Muskel nutzt Ultraschall-Trick für Bewegung
Sie wirken lebendig, doch sie bestehen nur aus Silikon und Luftblasen. In einem Labor der ETH Zürich beugen, rollen und schlängeln sich hauchdünne Membranen - ohne Kabel, ohne Motor, allein durch Ultraschall.
Die künstlichen Muskeln bestehen aus einem transparenten Polymerfilm, in dem winzige Hohlräume eingefasst sind. Wird die Membran in Wasser gelegt und mit Schall bestrahlt, fangen die Blasen darin an zu pulsieren. Dabei erzeugen sie winzige Strömungen, die den Film verformen - ähnlich wie echte Muskelfasern, die sich beim Zusammenziehen verschieben. Die Forscher sprechen von über 10.000 Mikroblasen pro Muskel, jede steuerbar über ihre Resonanzfrequenz zwischen 9 und 95 Kilohertz.
 Auf YouTube ansehen
Auf YouTube ansehen
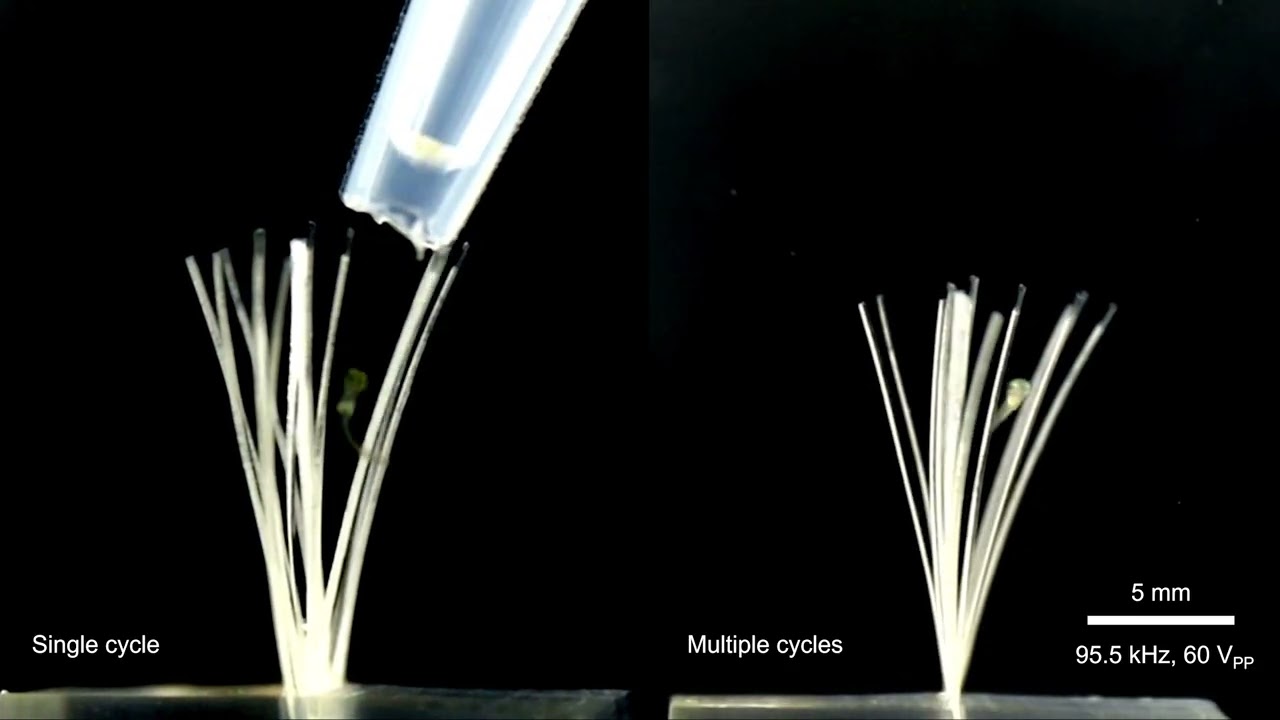
Mit dieser Methode konnten sie feine Bewegungen realisieren: Ein Greifer hob eine Zebrafisch-Larve an, ohne sie zu verletzen. Eine biegsame "Robotic Skin" ließ sich auf Obst oder sogar auf ein Schweineherz legen und bewegte es sanft unter Ultraschallansteuerung. Und ein kleiner "Stingraybot" schwamm durch ein ex-vivo-Organ, getrieben allein durch Schallwellen, die seine Mikroblasen zum Schlagen brachten. Die Reaktionszeit liegt unter 100 Millisekunden, die Dichte bei rund 3000 Blasen pro Quadratmillimeter, das Gewicht bei kaum 0,05 Milligramm je Quadratmillimeter.
 Vielversprechend in vielen Bereichen
Sicher ist: Diese akustischen Muskeln verbinden Biokompatibilität mit präziser Steuerung. Sie könnten weiche Roboter, Prothesen und Implantate beweglich machen - kabellos, skalierbar und feinfühlig. Damit öffnet sich ein neues Kapitel der Soft Robotics, in dem Bewegung nicht mehr von Strom, sondern von Schall getragen wird.
Vielversprechend in vielen Bereichen
Sicher ist: Diese akustischen Muskeln verbinden Biokompatibilität mit präziser Steuerung. Sie könnten weiche Roboter, Prothesen und Implantate beweglich machen - kabellos, skalierbar und feinfühlig. Damit öffnet sich ein neues Kapitel der Soft Robotics, in dem Bewegung nicht mehr von Strom, sondern von Schall getragen wird.
Siehe auch:

Einmal anspannen: Muskelkraft per Ultraschall
Das Team um Daniel Ahmed hat künstliche Muskeln entwickelt, die aus Tausenden winziger Mikroblasen bestehen. Jede Blase ist exakt so groß, dass sie bei einer bestimmten Schallfrequenz zu schwingen beginnt. Wird der Ultraschall verändert, geraten andere Blasen in Bewegung - so entstehen kontrollierte, wellenförmige Deformationen. Der Effekt summiert sich: Lokale Punktkräfte fügen sich zu greifenden, biegenden oder schwimmenden Bewegungen.Die künstlichen Muskeln bestehen aus einem transparenten Polymerfilm, in dem winzige Hohlräume eingefasst sind. Wird die Membran in Wasser gelegt und mit Schall bestrahlt, fangen die Blasen darin an zu pulsieren. Dabei erzeugen sie winzige Strömungen, die den Film verformen - ähnlich wie echte Muskelfasern, die sich beim Zusammenziehen verschieben. Die Forscher sprechen von über 10.000 Mikroblasen pro Muskel, jede steuerbar über ihre Resonanzfrequenz zwischen 9 und 95 Kilohertz.
Auf YouTube ansehenMit dieser Methode konnten sie feine Bewegungen realisieren: Ein Greifer hob eine Zebrafisch-Larve an, ohne sie zu verletzen. Eine biegsame "Robotic Skin" ließ sich auf Obst oder sogar auf ein Schweineherz legen und bewegte es sanft unter Ultraschallansteuerung. Und ein kleiner "Stingraybot" schwamm durch ein ex-vivo-Organ, getrieben allein durch Schallwellen, die seine Mikroblasen zum Schlagen brachten. Die Reaktionszeit liegt unter 100 Millisekunden, die Dichte bei rund 3000 Blasen pro Quadratmillimeter, das Gewicht bei kaum 0,05 Milligramm je Quadratmillimeter.
Idee die bewegt
Die Studie, erschienen in Nature (Shi et al., 2025), liefert auch ein theoretisches Modell für diese schallangetriebene Mechanik und zeigt, dass sich die Deformationen gezielt planen lassen - durch Variation von Spannung, Frequenz und Blasengröße. Noch stören Wachstumsprozesse der Blasen nach längerem Betrieb, doch Lösungen wie versiegelte Kavitäten zeichnen sich ab.Vielversprechend in vielen Bereichen
Sicher ist: Diese akustischen Muskeln verbinden Biokompatibilität mit präziser Steuerung. Sie könnten weiche Roboter, Prothesen und Implantate beweglich machen - kabellos, skalierbar und feinfühlig. Damit öffnet sich ein neues Kapitel der Soft Robotics, in dem Bewegung nicht mehr von Strom, sondern von Schall getragen wird.
Was sind künstliche Muskeln und wie funktionieren sie?
Künstliche Muskeln sind synthetische Materialien, die ihre Form durch elektrische Impulse verändern können - ähnlich wie biologisches Muskelgewebe bei Lebewesen. Die vielversprechendsten Varianten basieren auf elektroaktiven Polymeren (EAPs).
Diese Spezialkunststoffe reagieren auf niedrige elektrische Spannungen und können sich dabei ausdehnen, zusammenziehen oder verbiegen. Der Mechanismus ähnelt natürlichen Muskeln: Ionen wandern zwischen verschiedenen Schichten und erzeugen dabei mechanische Bewegung.
Besonders interessant sind Kohlenstoff-Nanoröhrchen-basierte Varianten: Sie arbeiten geräuschlos, funktionieren in normaler Luft, können gleichzeitig als Sensor dienen und lassen sich vergleichsweise einfach herstellen.
Diese Spezialkunststoffe reagieren auf niedrige elektrische Spannungen und können sich dabei ausdehnen, zusammenziehen oder verbiegen. Der Mechanismus ähnelt natürlichen Muskeln: Ionen wandern zwischen verschiedenen Schichten und erzeugen dabei mechanische Bewegung.
Besonders interessant sind Kohlenstoff-Nanoröhrchen-basierte Varianten: Sie arbeiten geräuschlos, funktionieren in normaler Luft, können gleichzeitig als Sensor dienen und lassen sich vergleichsweise einfach herstellen.
Warum brauchen wir weiche Robotertechnologie?
Herkömmliche Roboter mit starren Metallteilen, schweren Motoren und Hydrauliksystemen sind für viele zukünftige Anwendungen ungeeignet. Ihre Steifigkeit macht sie gefährlich im direkten Menschenkontakt und ungeschickt bei feinfühligen Aufgaben.
Stellen Sie sich vor, ein Pflegeroboter soll älteren Menschen beim Anziehen helfen oder ein Serviceroboter soll empfindliche Gegenstände greifen. Harte Greifer könnten Menschen verletzen oder zerbrechliche Objekte beschädigen.
Weiche Antriebssysteme passen sich an Konturen an, reagieren nachgiebig auf Widerstand und arbeiten leise. Sie sind leichter, flexibler und ermöglichen natürlichere Bewegungen - wichtige Voraussetzungen für sichere Mensch-Maschine-Interaktion.
Stellen Sie sich vor, ein Pflegeroboter soll älteren Menschen beim Anziehen helfen oder ein Serviceroboter soll empfindliche Gegenstände greifen. Harte Greifer könnten Menschen verletzen oder zerbrechliche Objekte beschädigen.
Weiche Antriebssysteme passen sich an Konturen an, reagieren nachgiebig auf Widerstand und arbeiten leise. Sie sind leichter, flexibler und ermöglichen natürlichere Bewegungen - wichtige Voraussetzungen für sichere Mensch-Maschine-Interaktion.
Welche Vorbilder liefert die Natur?
Tintenfische demonstrieren eindrucksvoll, was ohne starre Skelette möglich ist: Sie schlängeln sich durch engste Spalten, koordinieren acht Arme mit unzähligen Bewegungsfreiheiten mühelos und verändern sogar Hautfarbe und -textur zur Tarnung.
Solche Fähigkeiten entstanden durch Millionen Jahre Evolution. Mit konventioneller Technik wären hunderte Miniaturmotoren, komplexe Getriebe und aufwendige Steuerungssysteme nötig - viel zu schwer, teuer und störanfällig.
Die Soft-Robotik versucht, biologische Prinzipien mit modernen Materialien nachzubilden. Ziel ist es, Maschinen zu entwickeln, die sich ähnlich anpassungsfähig und elegant bewegen wie ihre natürlichen Vorbilder.
Solche Fähigkeiten entstanden durch Millionen Jahre Evolution. Mit konventioneller Technik wären hunderte Miniaturmotoren, komplexe Getriebe und aufwendige Steuerungssysteme nötig - viel zu schwer, teuer und störanfällig.
Die Soft-Robotik versucht, biologische Prinzipien mit modernen Materialien nachzubilden. Ziel ist es, Maschinen zu entwickeln, die sich ähnlich anpassungsfähig und elegant bewegen wie ihre natürlichen Vorbilder.
Wo könnten künstliche Muskeln eingesetzt werden?
Medizintechnik bietet vielfältige Möglichkeiten: Aktive Prothesen, die natürliche Bewegungen nachahmen, oder Exoskelette, die Menschen mit eingeschränkter Mobilität unterstützen. Auch chirurgische Instrumente könnten präziser und schonender arbeiten.
In der Pflege könnten Assistenzroboter mit weichen Greifern Patienten beim Umlagern helfen oder Alltagsaufgaben übernehmen, ohne Verletzungsgefahr. Auch für Servicetätigkeiten wie Haarpflege wären sanfte Robotersysteme denkbar.
Industrielle Anwendungen umfassen die Handhabung empfindlicher Produkte, kollaborative Montageaufgaben oder textile Systeme mit steuerbarer Durchlässigkeit. Selbst in der Architektur werden adaptive Gebäudehüllen erforscht.
In der Pflege könnten Assistenzroboter mit weichen Greifern Patienten beim Umlagern helfen oder Alltagsaufgaben übernehmen, ohne Verletzungsgefahr. Auch für Servicetätigkeiten wie Haarpflege wären sanfte Robotersysteme denkbar.
Industrielle Anwendungen umfassen die Handhabung empfindlicher Produkte, kollaborative Montageaufgaben oder textile Systeme mit steuerbarer Durchlässigkeit. Selbst in der Architektur werden adaptive Gebäudehüllen erforscht.
Wann werden künstliche Muskeln Alltag?
Trotz vielversprechender Forschungsergebnisse gibt es bisher kaum kommerzielle Produkte. Die Herausforderungen sind beträchtlich: komplizierte Produktionsprozesse, empfindliche Materialien und noch unzureichende Leistungsdaten bremsen die Verbreitung.
Forschungseinrichtungen arbeiten an der Industrialisierung: Automatisierte Beschichtungsverfahren sollen Kosten senken und Qualität verbessern. Nur durch skalierbare Fertigungsmethoden wird die Technologie massentauglich.
Die mediale Aufmerksamkeit wächst stetig, neue Anwendungsszenarien werden regelmäßig vorgestellt. Bis weiche Roboter jedoch im Alltag ankommen, dürften noch Jahre vergehen - die Grundlagen werden aber heute gelegt.
Forschungseinrichtungen arbeiten an der Industrialisierung: Automatisierte Beschichtungsverfahren sollen Kosten senken und Qualität verbessern. Nur durch skalierbare Fertigungsmethoden wird die Technologie massentauglich.
Die mediale Aufmerksamkeit wächst stetig, neue Anwendungsszenarien werden regelmäßig vorgestellt. Bis weiche Roboter jedoch im Alltag ankommen, dürften noch Jahre vergehen - die Grundlagen werden aber heute gelegt.
Zusammenfassung
- ETH Zürich entwickelt künstliche Muskeln aus Silikon mit Mikroblasen
- Ultraschallwellen erzeugen kontrollierte Bewegungen ohne Kabel oder Motor
- Über 10.000 steuerbare Mikroblasen pro Muskel mit Resonanzfrequenzen
- Anwendungen umfassen sanfte Greifer für Zebrafischlarven und Organmanipulation
- Reaktionszeit unter 100 Millisekunden bei sehr geringem Material-Gewicht
- Forscher veröffentlichten theoretisches Modell in Nature am 30. Oktober 2025
- Potenzial für kabellose, biokompatible Robotik, Prothesen und Implantate
Siehe auch:
Thema:
Beliebte Downloads
Neue Nachrichten







❤ WinFuture unterstützen
Sie wollen online einkaufen?
Dann nutzen Sie bitte einen der folgenden Links,
um WinFuture zu unterstützen:
Vielen Dank!
Alle Kommentare zu dieser News anzeigen